摘要: 简介了远程监视与故障诊断专家系统在国内空分设备中应用的实际意义, 着重分析了
大型空分设备远程监视与故障诊断专家系统中远程监视模块和故障诊断模块的开发。
关键词: 大型空分设备; 远程监视; 故障诊断; 专家系统
中图分类号: TB663 文献标识码: A
Internet2based expert system of remote monitoring and fault
diagnosis of air separation unit
Xu Zhi2qiu , He Guo2geng , Li Jia , Tu Ya2li , Liu Xuan2fei , Yu Yong
( Institute of Ref rigeration and Cryogenics , Huazhong University of Science and Technology , 1037 Luoyu Road ,
Wuhan 430074 , Hubei , P1R1China)
Abstract : The importance of application of expert system of remote monitoring and fault diagnosis ( ES2RMFD) in air
separation industry is briefly introduced. Emphasis is focused on the development of the remote monitoring and fault
diagnosis module in the ES2RMFD for large scale air separation unit .
Keywords : Large scale air separation unit ; Remote monitoring ; Fault diagnosis ; Expert system
1 远程故障诊断与监视在大型空分设备中应用的必要性
空分设备机组众多, 工艺流程复杂, 且启动周期长。应保持连续、稳定的运转状况, 不能频繁地开机和停机, 一旦发生故障, 将带来较大的经济损失。因此, 准确地判断空分设备的运行状态、迅速地确定故障性质与故障部位, 及时地找到故障起因并提出排除故障的相应措施, 对于保证空分设备正常工作和气体供应具有重要的实际意义。
远程实时监视, 可以实现空分设备运转信息的远程共享, 便于专家在远程对设备现场的指导, 从而可以实现专家对空分设备的“远程会诊”。
故障诊断专家系统能够借助于计算机高速的运算能力, 将众多空分设备专家所具有的知识编制成知识库, 运用先进的推理技术, 帮助技术人员分析和解决复杂设备故障问题。
2 系统结构
笔者以某16000m3 / h 空分设备为对象, 研究开发基于Web 的空分设备远程监视与故障诊断专家系统。系统每5s 从空分设备的DCS 系统中采集1次数据, 然后对其进行远程监视与诊断。系统主要包括4 个模块(如图1 所示) : ①实时监视模块; ②故障诊断模块; ③状态分析模块;④系统维护模块。
3 远程监视模块的开发
目前一些DCS 系统虽然具有远程监视功能,但其仅限于企业局域网内生产控制专网, 在局域网内部可实现远程监视, 这并不是真正基于Internet意义上的空分设备远程监视系统。这里所说的远程监视是指通过Internet 访问的远程监视。
311 远程监视模块的网络结构
一般远程诊断与监视技术采用客户端/ 服务器结构, 通常有两种技术路线可供选择, 一种是B/ S(Browse/ Sever) 模式, 另一种是C/ S (Client/ Server)模式。两者各有优缺点。
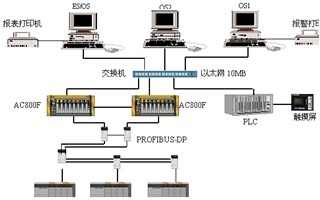
在基于B/ S 模式的分布式Web 应用系统中,为增强Web 页面的动态交互性, 使浏览端用户能在线访问数据库, 关键技术就是Web 服务器与数据库的连接。传统的方法主要有CGI、ISAPI 等技术, 但这些技术切入点不容易确定、开发步骤繁琐、效率不高、不易除错且无法直接与HTML 集成, 只适合专业的程序员使用, 在实际应用中难以进行快速开发、及时维护和大面积推广。而ASP(Active Server Page) 技术应用起来更加灵活、更具交互性。C/ S 模式可以实现分布的处理与集中的数据管理, 同时数据安全性高、通讯快; B/ S 模式则有利于实现系统集成与扩展。因此可以把两者结合起来, 充分发挥各自的长处, 可以开发出安全可靠、灵活方便和效率高的在线监视与故障诊断系统。鉴于以上分析, 本专家系统采用C/ S 模式与B/ S 模式相结合的混合方式, 采用3 层结构: 客户端、Web 服务器和数据库服务器, 网络的具体结构实现如图2 所示。
312 采用OPC 技术实现DCS 系统数据采集
由于本专家系统基于DCS 系统, 因此采用基于Web 服务器的DCS 系统数据集成技术。
对于空分设备的远程监视系统, OPC 技术的实现包括两个组成部分: OPC 服务器部分及OPC 客户应用部分。OPC 服务器通过以太网TCP/ IP 协议采集DCS 系统实时数据, 并将这些数据以OPC 位号的形式开放给各个客户端应用程序。OPC 客户端通过OPC 标准接口与OPC 服务器通讯接收数据。
313 从Web 服务器向远程客户端发布数据
受数据采集和网络传输过程的技术条件限制,空分设备运行的远程监视实时性能会受到一定的影响, 但对于监视、管理和信息查询等用户需求是可以满足的。远程实时监视系统的结构如图3 所示。
314 网络的安全措施
基于Internet 的远程监视系统是与企业的控制系统相连接的, 因此网络的安全措施显得尤为重要。为了满足身份认证及访问控制、信息的保密性和完整性及用户漫游等安全要求, 采用了以下安全措施:
(1) 集成Windows 验证 连接到Web 服务器时需要用户名和密码。
(2) Source Socket Layer 利用服务器端的数字证书和客户端的数字证书实现身份认证。
(3) 将客户端操作人员分为个体管理员、系统管理员和普通浏览员。不同的身份对应不同的权限等级, 不同权限等级的人员能够访问的系统资源也将不同。
(4) 操作日志及审查 主要包括一些记录,如: 远程用户名称、IP 地址、连接时间和断开连接时间等。操作信息则包括所作操作的名称、发生时间、操作前状态和操作结果等。这些日志可以跟踪操作人员所做的工作, 定期审查日志记录可以提高系统的安全性, 及早发现存在的问题。
(5) 企业级防火墙 防火墙可限制网络内的数据流量。常用于限制客户端对Web 服务器的恶意攻击。
(6) 杀毒软件 安装在Web 服务器上, 用于病毒的防护。
4 故障诊断模块的开发
本专家系统采用远程故障诊断方法, 其网络结构与远程监视相同。
故障诊断模块包括: ①故障征兆的获取; ②知识库的建立; ③推理机的设计。
411 故障征兆的提取
本专家系统的实时数据库中, 每5s 刷新1 次数据。为了保证故障征兆的自动获取, 必须每5s检测1 次数据, 对数据进行对比分析, 征兆的获取流程如图4 所示。对不同的数据类型采取不同的对比方法, 常见的故障征兆有以下几种: ①参数型征兆的获取; ②波形征兆的获取; ③频谱型征兆的获取; ④轨迹型征兆的获取。
412 知识库的开发
知识库主要用来存放专家提供的专门知识, 为推理机提供求解问题所需的知识。
41211 知识库的开发流程
知识库的开发是故障诊断专家系统的核心部分, 它包括: ①专家知识的汇总; ②寻找知识的特征; ③建立知识之间的联系、推理关系; ④将知识以某种表达方式存储在计算机数据库中, 编制推理算法; ⑤将推理算法编制成程序, 调试程序。由于知识纷繁复杂, 各种故障机理相互交织,所以知识库的开发不可能一蹴而就, 需要反复的修改才能达到比较好的诊断效果。
41212 规则表示
从专家那里得来的知识, 只是一条条的经验,需要进行必要的抽象, 找出什么是故障, 什么是原因, 引起故障的原因有哪些, 初步找出故障与原因之间的对应关系。给每一个事实赋予一个唯一的数字标识, 称之为键值, 这样进行规则匹配时比较的只是整数型键值, 从而避免了字符匹配所带来的不便, 提高了匹配速度。事实库中不仅可放前提、结论事实, 还可存放其他事实(如故障对策) , 其结构如图5 所示。
413 推理机的开发
推理机根据空分设备当前的运行状态启动知识库中的有关规则, 刷新动态数据库并保存推理轨迹以期对诊断结果进行解释。实际上就是利用诊断知识库的知识, 根据空分设备运行状态的征兆, 对空分设备的历史数据进行比较、推理和诊断以求解策略。推理机包括推理方法和推理方向。本专家系统采用不精确正向推理方法。
41311 不精确推理的可信度计算
本专家系统采用基于规则的不精确推理, 其一般表示形式为IF E THEN。其中E 为前提, 它既可以是一个简单条件, 也可以是由多个简单条件构成的逻辑组合。CF ( H , E) 为规则可信度, H 为结论。
规则的可信度由专家给出, 征兆的可信度由用户给出, 诊断结论可信度由规则的可信度与事实的可信度按MYCIN 中的算法传播计算得出, 其基本步骤如下。
(1) 计算前提可信度:
式中: E1 、E2 ?En 为匹配成功的一条规则的n 条前提。
(2) 计算规则结论可信度:
(3) 两条规则具有相同的结论时, 合成可信度的计算方法, 先由式(1) 和(2) 求出结论1 可信度CF1 ( H) 和结论2 可信度CF2 ( H) , 进而可求出合成可信度。
(4) 对于多规则深度推理的结论可信度只需重复上述步骤就可得出最终的结论可信度。
41312 本专家系统的不精确正向推理法
由于空分设备有可能出现多故障并发, 诊断结论不止一个, 因此采用不精确推理, 同时采用正向推理, 从已知的事实出发, 运用规则库中的规则一步一步推导出结论, 这种方式又称事实驱动方式。不精确正向推理具体过程如图6 所示。
(1) 处理规则的前提, 看匹配成功的规则前提中是否有结论库中的事实。若有则该事实为中间结果, 应将它从结论库中删除。
(2) 处理规则的结论, 把规则的结论作为新的事实。若结论库中没有该事实, 则将之添加到征兆库作征兆备用, 添加到结论库作结论备用。
(3) 处理规则本身, 将其添加到激活规则库中供解释机制使用。
5 结束语
通过Internet 发布状态监视和故障诊断系统的实时信息, 使氧气厂管理人员和工程技术人员能及时了解空分设备的运行状态, 以便对机组的异常情况采取应急措施, 确保机组运行安全。不精确正向推理彻底解决了传统专家系统自适应能力较差, 遇到新故障不能正确处理而出现匹配冲突、组合爆炸等问题。